2023年7月14日,山东大学机械工程学院“智慧茶客”社会实践团队在日照市瑜山茶场进行了多臂协同机器人采茶试验,实验内容为多臂协同机器人在采茶区域自主进行多臂协同采摘,对实验结果进行了分析。
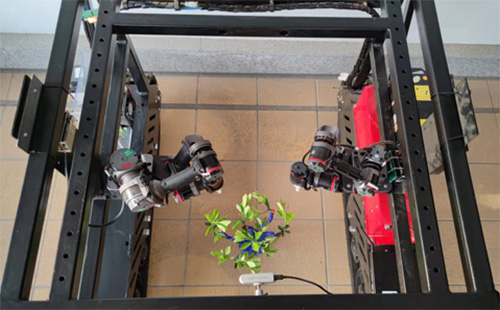
首先,“智慧茶客”社会实践团队搭建了双机械臂协同采摘试验环境。采用对向放置的两机械臂对嫩芽进行采摘。双机械臂协同采摘系统是对四机械臂协同方案的简化,但轨迹仍使用多臂协同模型来进行生成,从而对多臂协同采摘进行验证。多臂协同模型训练过程中每个机械臂的任务是同质的,可以对机械臂数量进行增减,且不会对协同采摘的效果产生影响。其次,将实验结果进行了数据分析,对比单臂,双臂协同采摘基本完成了效率翻倍的采摘效果,且缩小了每个机械臂的运动范围后,采摘成功率有所提升,系统的容错率有较大提高。
经过此次实验,我们对于多臂协同机器人的工作有了明确的方向,对于未来的改进有着重要的意义。